When we think about cloud robotics, we understand it consist
of off-loading the computationally intensive tasks from a robot to a
more powerful external resource that will process the data and send an
answer or instructions on what to do back to the robot. We usually
envision this computational outsourcing to be done by powerful server
farms, but Tim Field from Willow Garage has a different idea and devised a system to allow these complex tasks to be offloaded to other humans.
The Heaphy Project
allows humans to help ROS-enabled robots perform complex tasks via
teleoperation. This means that if you need to empty your dryer, you
could ask your robot to do it which, in turn, will hire a human to help
him with the chore. This might seem a convoluted patch to follow in
order to have humans perform chores but the long-term goal is to have
robots learn these tasks from their human operators.
The video bellow explains how this projects works and how you can get started teleoperating robots via the Amazon Mechanical Turk.
We're used to thinking of robots as mechanical entities, but at very
small scales, it sometimes becomes easier to use existing structures
(like microorganisms that respond to magnetic fields or even swarms ofbacteria)
instead of trying to design and construct one (or lots) of teeny tiny
artificial machines. Aaron Ohta's lab at the University of Hawaii at
Manoa has come up with a novel new way of creating non-mechanical
microbots quite literally out of thin air, using robots made of bubbles
with engines made of lasers.
To get the bubble robots to move around in this saline solution, a 400
mW 980nm (that's infrared) laser is shone through the bubble onto the
heat-absorbing surface of the working area. The fluid that the bubbles
are in tries to move from the hot area where the laser is pointing
towards the colder side of the bubble, and this fluid flow pushes the
bubble towards the hot area. Moving the laser to different
sides of the bubble gives you complete 360 degree steering, and since
the velocity of the bubble is proportional to the intensity of the
laser, you can go as slow as you want or as fast as about 4 mm/s.
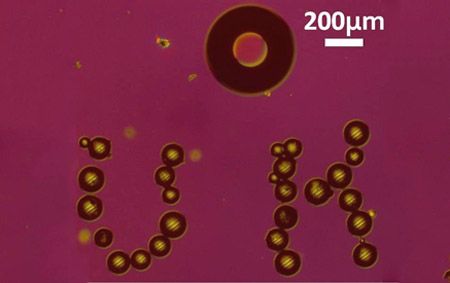
This level of control allows for very fine manipulation of small
objects, and the picture below shows how a bubble robot has pushed glass
beads around to form the letters "UH" (for University of Hawaii, of
course):
Besides being able to create as many robots as you want of differing
sizes out of absolutely nothing (robot construction just involves a
fine-tipped syringe full of air), the laser-controlled bubbles have
another big advantage over more common microbots in that it's possible
to control many different bubbles independently using separate lasers or
light patterns from a digital projector. With magnetically steered
microbots, they all like to go wherever the magnetic field points them
as one big herd, but the bubbles don't have that problem, since each
just needs its own independent spot of light to follow around.
The researchers are currently investigating how to use teams of tiny
bubbles to cooperatively transport and assemble microbeads into complex
shapes, and they hope to eventually develop a system that can provide
real-time autonomous control based on visual feedback. Eventually, it
may be possible to conjure swarms of microscopic bubble robots out of
nothing, set them to work building microstructures with an array of
thermal lasers, and then when they're finished, give each one a little
pop to wipe it completely out of existence without any mess or fuss.
Cooperative Micromanipulation Using Optically Controlled Bubble Microrobots
by Wenqi Hu, Kelly S. Ishii, and Aaron T. Ohta of the the Department of
Electrical Engineering, University of Hawaii at Manoa, was presented
last week at the 2012 IEEE International Conference on Robotics and Automation in St. Paul, Minn.
An important announcement for the field of robotics was made at Google IO 2011 that complements the announcement for the Android Open Accessory Kit.
As shown in the video below about Cloud Robotics (this presentation
is very interesting and explores somewhat involved robot
programming), there is a new implementation of ROS, the popular operating system for robots, that runs directly on Android. Even PR2 was invited to the talk!
This means that any ROS compatible robot (including Arduino-based robots) can be controlled via an Android phone, including the popular PR2.
This interoperability and the power of cloud computing could provide
robots, in the future, with better abilities especially when facing
unexpected situations. With the power of the cloud, robots can offload
complex computations and thus require less electrical power for
computations. They could also learn new skills on the fly without
needing to have all possible skills installed at once.
We are also happy to see that this technology is accessible to everyone through the use of Arduino and Open Hardware. RobotShop’s MyRobots.com
initiative is compatible with this vision ans also aims to give robots,
and robot owners, the power of the cloud though Open Hardware and
Software.